
ครูธวัชชัย ฝ่ายพลแสน

วิทยาการหุ่นยนต์ - ครูธวัชชัย ฝ่ายพลแสน
โรงเรียนนาเชือกพิทยาสรรค์ เลขที่ 10 ถ. นาเชือก-พยัคฆภูมิพิสัย ต.นาเชือก อ.นาเชือก จ.มหาสารคาม 44170
| คือ สมองกลที่ควบคุมการทำงานของหุ่นยนต์ เช่น สมองกลที่ประดิษฐ์จากอุปกรณ์อิเล็กทรอนิกส์ เครื่องควบคุมขนาดเล็ก คอมพิวเตอร์ชนิดแผงวงจรสำเร็จรูป เครื่องควบคุมเชิงตรรกะที่สามารถสร้างโปรแกรมได้ คอมพิวเตอร์ส่วนบุคคล สมองกลที่ประดิษฐ์จากอุปกรณ์อิเล็กทรอนิกส์ ความแตกต่างระหว่างหุ่นยนต์กับเครื่องจักรกลทั่วไป คือ หุ่นยนต์มีระดับขั้นการทำงานด้วยตัวเองสูงกว่าเครื่องจักรกล สมองกลของหุ่นยนต์เปรียบได้กับสมองของมนุษย์ ซึ่งหากหุ่นยนต์ไม่มีสมองกลไว้สั่งการ ก็อาจเดินไปชนฝาผนังหรือสิ่งต่างๆ ได้ ในการควบคุมหุ่นยนต์ที่ไม่มีเงื่อนไขการทำงานมากนัก สามารถใช้อุปกรณ์อิเล็กทรอนิกส์พื้นฐาน เช่น ตัวต้านทาน ตัวเก็บประจุ ตัวเหนี่ยวนำ ทรานซิสเตอร์ อุปกรณ์ตรวจรู้มาประกอบกันเป็นวงจรควบคุมการทำงานของหุ่นยนต์ได้ |
|
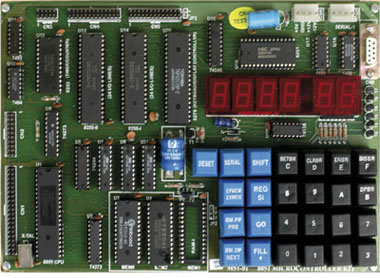 เครื่องควบคุมขนาดเล็ก |
|
| เครื่องควบคุมขนาดเล็ก (Microcontroller) หุ่นยนต์ที่มีเงื่อนไขของการทำงานมากขึ้น จำเป็นต้องเพิ่มความสามารถให้แก่สมองกลของหุ่นยนต์ ดังนั้น จึงได้มีการคิดค้นเครื่องควบคุมขนาดเล็กขึ้นมา เพื่อแทนที่วงจรอิเล็กทรอนิกส์และด้วยพื้นฐานดังกล่าว เครื่องควบคุมขนาดเล็กจึงสามารถเปลี่ยนแปลงเงื่อนไขการทำงานได้ง่าย โดยการเปลี่ยนโปรแกรมลำดับการควบคุม บนเครื่องคอมพิวเตอร์ส่วนบุคคล นอกจากนี้ราคาไม่แพง ต้องการแหล่งจ่ายไฟต่ำ เครื่องควบคุมขนาดเล็กจึงเป็นที่นิยมใช้กันมาก สำหรับการสร้างสมองกลให้แก่หุ่นยนต์ |
|
 แผงวงจรควบคุมการทำงานของหุ่นยนต์ |
|
| คอมพิวเตอร์ชนิดแผงวงจรสำเร็จรูป (Single Board Computer: SBC) เป็นเครื่องควบคุมที่มีการทำงานเหมือนกับคอมพิวเตอร์ส่วนบุคคล เพียงแต่ทุกอย่างจะย่อลงมาให้อยู่ในแผงวงจรเล็กๆ เพียงแผงเดียว ซึ่งนิยมใช้ในหุ่นยนต์ที่มีเงื่อนไขในการทำงานมาก หรือมีการควบคุมที่ซับซ้อน |
|
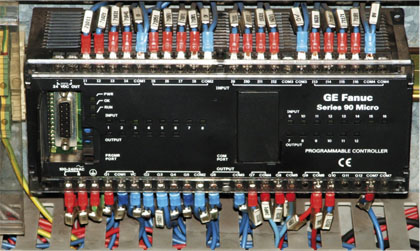 เครื่องควบคุมเชิงตรรกะที่สร้างโปรแกรมได้ |
เครื่องควบคุมเชิงตรรกะที่สามารถสร้างโปรแกรมได้ หรือพีแอลซี (Programmable Logic Controller : PLC) เครื่องควบคุมเชิงตรรกะที่สามารถสร้างโปรแกรมได้ถูกคิดค้นและพัฒนาขึ้นมา เพื่อทดแทนวงจรรีเลย์ (relay) ของการควบคุมระบบอัตโนมัติ ซึ่งนิยมใช้กันมากในโรงงานอุตสาหกรรม เนื่องจากมีความทนทานต่อสภาพแวดล้อม ในโรงงานอุตสาหกรรม ใช้งานสะดวก และปรับเปลี่ยนการทำงานได้ง่าย รวมทั้งสามารถใช้งานได้อย่างอเนกประสงค์ และง่ายต่อการบำรุงรักษา |
| คอมพิวเตอร์ส่วนบุคคล (Personal Computer: PC) คอมพิวเตอร์ส่วนบุคคลเป็นเครื่องควบคุมระดับสูง ซึ่งสามารถปรับเปลี่ยนการทำงานของหุ่นยนต์ได้อย่างหลากหลาย มีประสิทธิภาพมากที่สุด ในบรรดาเครื่องควบคุมทั้งหมดที่กล่าวมา แต่ไม่นิยมใช้ในหุ่นยนต์ทั่วไปมากนัก เนื่องจากมีขนาดใหญ่ น้ำหนักมาก และต้องการพลังงานสูง |
|