
ครูธวัชชัย ฝ่ายพลแสน

วิทยาการหุ่นยนต์ - ครูธวัชชัย ฝ่ายพลแสน
โรงเรียนนาเชือกพิทยาสรรค์ เลขที่ 10 ถ. นาเชือก-พยัคฆภูมิพิสัย ต.นาเชือก อ.นาเชือก จ.มหาสารคาม 44170
| คือ อุปกรณ์ที่สามารถเปลี่ยนแปลงพลังงานไฟฟ้าที่ป้อนเข้าให้กลายเป็นการกระจัด การเคลื่อนที่ หรือแรง เช่น มอเตอร์ไฟฟ้า ระบบนิวแมติก ระบบไฮดรอลิก | |
 อุปกรณ์ขับเร้า |
|
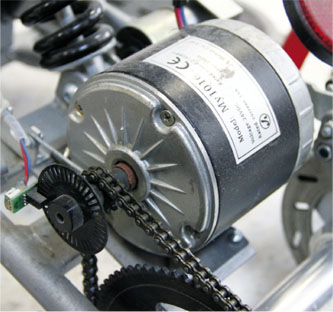
| มอเตอร์ไฟฟ้า (Electric motor) มอเตอร์ไฟฟ้าเป็นอุปกรณ์เปลี่ยนพลังงานไฟฟ้าเป็นพลังงานกล มีหน้าที่เป็นตัวขับกลไกต่างๆ ของหุ่นยนต์ให้เคลื่อนไหว เปรียบเสมือนกล้ามเนื้อของมนุษย์ที่มีหน้าที่ขับเคลื่อนอวัยวะต่างๆ ให้เคลื่อนไหว เช่น เมื่อต่อมอเตอร์เข้ากับข้อต่อ หุ่นยนต์จะสามารถหมุนข้อต่อนั้นได้ หรือต่อมอเตอร์เข้ากับชุดล้อ หุ่นยนต์ก็จะสามารถขับเคลื่อนได้ มอเตอร์ไฟฟ้าแบบหมุนต่อเนื่อง ประกอบไปด้วย ๒ ส่วน คือ ส่วนที่อยู่กับที่หรือสเตเตอร์ (stator) และส่วนที่เคลื่อนที่หรือโรเตอร์ (rotor) โดยมีหลักการทำงาน คือ กระแสไฟฟ้าที่ถูกจ่ายเข้าไปเป็นพลังงานให้แก่มอเตอร์ ทำให้เกิดสนามแม่เหล็กไฟฟ้าในขดลวดสเตเตอร์และขดลวดโรเตอร์ การผลักกันของสนามแม่เหล็กไฟฟ้าทั้งสอง ทำให้เพลาที่ต่ออยู่กับโรเตอร์หมุนอย่างต่อเนื่องไปเรื่อยๆ และจะหยุดหมุนก็ต่อเมื่อ ปิดการจ่ายพลังงานไฟฟ้า หรือแรงหมุนของมอเตอร์ไม่สามารถเอาชนะภาระที่มากระทำต่อมอเตอร์ได้ |
|
 มอเตอร์แบบลำดับขั้น |
|
| มอเตอร์แบบลำดับขั้นหรือสเตปเปอร์มอเตอร์ (Stepper motor) โดยทั่วไปแล้วมอเตอร์ไฟฟ้าจะมีการหมุนที่ต่อเนื่อง และอาจไม่สะดวกมากนัก หากต้องการสั่งการทำงานให้เคลื่อนที่เป็นองศา ตามที่กำหนด มอเตอร์แบบลำดับขั้นจึงเป็นอีกทางเลือกหนึ่ง ที่สามารถนำไปใช้งานควบคุมทิศทางการหมุน ตามตำแหน่งที่ต้องการได้ หากตำแหน่งนั้นตรงกับลำดับขั้นของมอเตอร์พอดี ลักษณะการทำงานของมอเตอร์แบบลำดับขั้น จะต้องป้อนสัญญาณพัลส์ (pulse) ให้แก่ขดลวดสเตเตอร์ ทำให้เกิดแรงผลักที่โรเตอร์ จึงเกิดการหมุนของมอเตอร์แบบลำดับขั้น เมื่อหมุนครบ ๑ รอบจะเท่ากับ ๓๖๐ องศา ซึ่งถ้ามอเตอร์แบบลำดับขั้นมีการหมุนเท่ากับ ๕ องศาต่อขั้น ความละเอียดในการหมุนของมอเตอร์แบบลำดับขั้นตัวนี้ จึงจะเท่ากับ ๗๒ ขั้นต่อรอบ ปัจจุบัน มีการใช้งานมอเตอร์แบบลำดับขั้นอย่างแพร่หลาย เพราะสามารถควบคุมการหมุนตำแหน่งใดก็ได้ เช่น หัวอ่านซีดีรอม ฮาร์ดดิสก์ ตลอดจนอุตสาหกรรมการผลิตต่างๆ เช่น หุ่นยนต์อุตสาหกรรม ระบบสายพาน |
| เซอร์โวมอเตอร์ (Servo motor) เป็นมอเตอร์ชนิดพิเศษ ที่สามารถควบคุมให้ทำงาน เฉพาะในตำแหน่งใดตำแหน่งหนึ่งได้ โดยเซอร์โวมอเตอร์ประกอบด้วย มอเตอร์ไฟฟ้า เซ็นเซอร์จับตำแหน่งของเพลา และวงจรอิเล็กทรอนิกส์ที่ควบคุมมอเตอร์ คำว่า “เซอร์โว” มาจากระบบ ที่สามารถควบคุมพฤติกรรมของมันเองได้ ซึ่งสามารถวัดตำแหน่งของตัวเอง และชดเชยกำลังงานที่เสียไป ด้วยสัญญาณควบคุมที่ป้อนกลับมา มอเตอร์ชนิดนี้ นิยมใช้ในงานที่ต้องการความแม่นยำของตำแหน่งสูง |
 เซอร์โวมอเตอร์ |
| ระบบนิวแมติก (Pneumatic) ระบบนิวแมติก คือ ระบบกำลังของไหลที่ใช้แรงดันของอากาศเป็นตัวขับเคลื่อนอุปกรณ์ต่างๆ ให้เป็นพลังงานกล เช่น กระบอกสูบระบบนิวแมติก มอเตอร์ระบบนิวแมติก เนื่องจากของไหลที่ใช้ในการอัดคือ อากาศ ซึ่งมีการอัดยุบตัวได้ ระบบนิวแมติกจึงไม่สามารถแบกรับน้ำหนักมากได้ |
|
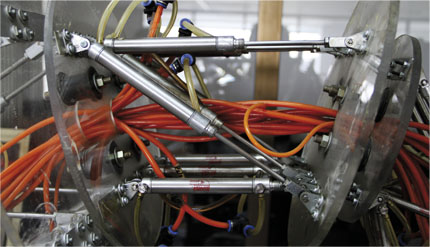 อุปกรณ์ระบบนิวแมติก |
|
| ระบบไฮดรอลิก (Hydraulic) ระบบไฮดรอลิก คือ ระบบกำลังของไหล ที่ใช้แรงดันของเหลวเป็นตัวขับเคลื่อนอุปกรณ์ต่างๆ ให้เป็นพลังงานกล โดยมีหลักการทำงานคล้ายระบบนิวแมติก แต่แตกต่างกันที่ของไหลที่ใช้ในการอัด เนื่องจากของไหลที่ใช้ในการอัดคือ ของเหลว ซึ่งไม่มีการยุบตัว ระบบไฮดรอลิกจึงนิยมใช้ในงานที่ต้องใช้กำลังสูง |
|
 อุปกรณ์ระบบไฮดรอลิก |
|