
ครูธวัชชัย ฝ่ายพลแสน

วิทยาการหุ่นยนต์ - ครูธวัชชัย ฝ่ายพลแสน
โรงเรียนนาเชือกพิทยาสรรค์ เลขที่ 10 ถ. นาเชือก-พยัคฆภูมิพิสัย ต.นาเชือก อ.นาเชือก จ.มหาสารคาม 44170
| คือ ชิ้นส่วนกลไกต่างๆ ของหุ่นยนต์ เช่น โครงสร้าง เพลา เฟือง สกรูส่งกำลัง สายพาน โซ่ สปริง ข้อต่อสวมเพลา คลัตช์ เบรก ข้อต่อ ก้านต่อโยง ตลับลูกปืนและปลอกสวม | |
 โครงสร้างของ "หุ่นยนต์คุณหมอพระราชทาน" |
โครงสร้าง (Frame) โครงสร้างเป็นส่วนประกอบหลักของหุ่นยนต์ ซึ่งทำหน้าที่ยึดจับอุปกรณ์ต่างๆ ในตัวหุ่นยนต์ และยังป้องกันอุปกรณ์ต่างๆ ไม่ให้ได้รับอันตรายจากภายนอก โครงสร้างของหุ่นยนต์เปรียบได้กับโครงกระดูกของมนุษย์ และมีลักษณะแตกต่างกันไป ตามหน้าที่การทำงานและวัตถุประสงค์ของหุ่นยนต์นั้นๆ เช่น หุ่นยนต์ทรงกลมที่สร้างขึ้น เพื่อศึกษาลักษณะการกลิ้ง จะออกแบบโครงสร้างของหุ่นยนต์ให้มีลักษณะเหมือนลูกบอล แต่หากหุ่นยนต์ถูกสร้างขึ้นมา เพื่อเลียนแบบการทำงาน หรือการเคลื่อนที่ของสิ่งมีชีวิต โครงสร้างนั้นก็จะถูกออกแบบมาให้มีลักษณะคล้ายกับสิ่งมีชีวิตชนิดนั้นๆ โดยแสดงโครงสร้างขาของหุ่นยนต์เลียนแบบขาของมนุษย์ วัสดุที่นิยมนำมาสร้างเป็นโครงสร้างของหุ่นยนต์ ได้แก่ อะลูมิเนียม เหล็ก พลาสติก ซึ่งการเลือกใช้วัสดุนั้นขึ้นอยู่กับลักษณะการนำไปใช้งาน เช่น หากต้องการสร้างหุ่นที่มีน้ำหนักเบา ควรเลือกใช้อะลูมิเนียมเป็นวัสดุหลัก นอกจากนี้ การเลือกใช้วัสดุควรคำนึงถึงปัจจัยอื่นๆ ประกอบด้วย เช่น กระบวนการผลิต ราคา |
| เพลา (Shaft) เพลาเป็นชิ้นส่วนที่มีลักษณะเป็นก้านทรงกระบอกที่หมุนได้ ใช้สำหรับการส่งถ่ายกำลังจากอุปกรณ์ขับเร้า เช่น มอเตอร์ ไปยังส่วนที่เคลื่อนไหวของหุ่นยนต์ เพลาเป็นชิ้นส่วนที่สำคัญมากในหุ่นยนต์ที่เคลื่อนไหวได้ทุกชนิด นอกจากเพลาแล้ว ยังมีแกน (axle) ซึ่งมีลักษณะเดียวกันกับเพลา แต่ไม่สามารถหมุนได้ ทำหน้าที่รองรับชิ้นส่วนที่หมุน เช่น ล้อ |
|
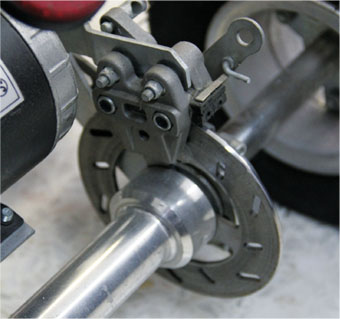
 เพลาขับ ทำหน้าที่ถ่ายทอดพลังงานในการขับเคลื่อนไปที่ล้อ |
|
| เฟือง (Gear) เฟืองทำหน้าที่ส่งกำลังจากเพลาหนึ่งไปยังอีกเพลาหนึ่ง โดยใช้การขบกันของฟันเฟือง ในการส่งถ่ายกำลังของเฟืองนั้น จะประกอบไปด้วยเฟือง ๒ ตัว ที่ขบกันอยู่ โดยมีเฟืองขับ (driving gear) หรือพิเนียน (pinion) เป็นตัวหมุนส่งกำลังให้แก่เฟืองตาม (driven gear) เฟืองที่นิยมใช้ในหุ่นยนต์มีอยู่หลายชนิด ซึ่งเฟืองแต่ละชนิดสามารถจำแนกได้ตามลักษณะของฟัน ได้แก่ เฟืองตรง เฟืองเฉียง เฟืองดอกจอก และชุดเฟืองหนอน |
|
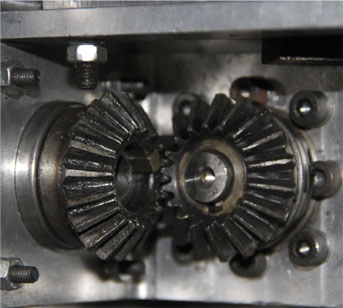 เฟืองดอกจอก |
|
| สกรูส่งกำลัง (Power screw) สกรูส่งกำลังมีหน้าที่ส่งกำลังโดยเปลี่ยนจากการหมุนเป็นการเลื่อน มีอัตราการทดของเฟืองที่สูงมาก จึงสามารถใช้ในการส่งถ่ายกำลังได้ดี นิยมใช้ในงานที่ต้องแบกรับน้ำหนักมากๆ |
|
| สายพาน (Belt) สายพานมีหน้าที่ส่งกำลังจากเพลาหนึ่งไปยังอีกเพลาหนึ่ง เช่นเดียวกับเฟือง แต่สายพานมีสมบัติเฉพาะตัว คือ อ่อนตัวได้ สามารถรับแรงกระตุกและแรงสั่นได้ดีกว่าเฟือง เสียงเบากว่า แต่ก็มีข้อเสีย คือ อัตราทดไม่แน่นอน เนื่องจาก การไถลตัวของสายพาน และไม่สามารถรับอัตราทดที่สูงได้ การส่งกำลังด้วยสายพานทำได้โดยติดตั้งวงล้อสายพานตั้งแต่ ๒ อันขึ้นไป โดยทั่วไปชนิดของสายพานที่นิยมใช้ในหุ่นยนต์ ได้แก่ สายพานแบน ที่มีหน้าตัดขวางเป็นรูปสี่เหลี่ยมผืนผ้า สายพานกลม ที่มีหน้าตัดขวางเป็นวงกลม สายพานลิ่ม ที่มีหน้าตัดขวางเป็นสี่เหลี่ยมคางหมู และสายพานฟัน ที่มีลักษณะเหมือนกับสายพานแบน แต่ที่สายพานจะมีฟัน เพื่อใช้ขบกับวงล้อสายพานแบบเฟือง ทำให้ไม่มีการลื่นไถล |
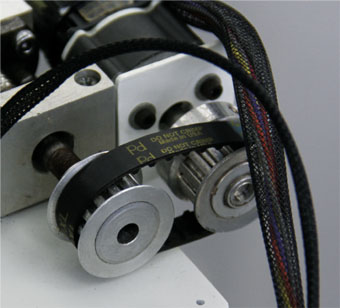 สายพานฟัน |
| โซ่ (Chain) โซ่มีหน้าที่ส่งกำลังจากเพลาหนึ่งไปยังอีกเพลาหนึ่งเช่นเดียวกับเฟืองและสายพาน ในการส่งกำลัง โซ่จะคล้องอยู่รอบเฟืองโซ่ตั้งแต่ ๒ อันขึ้นไป ซึ่งเฟืองโซ่เป็นล้อที่มีฟันรูปร่างพิเศษ เพื่อรับกับร่องของโซ่ ในการขับด้วยโซ่นั้น ข้อโซ่จะขบกับฟันของเฟืองโซ่ จึงไม่มีการลื่นไถล ทำให้การส่งกำลังมีอัตราทดคงที่เช่นเดียวกับการขับด้วยเฟือง แต่การติดตั้งไม่ต้องเที่ยงตรงเหมือนกับการติดตั้งเฟือง จึงเป็นที่นิยมกันมาก แต่ก็มีข้อเสีย คือ มีเสียงดัง |
|
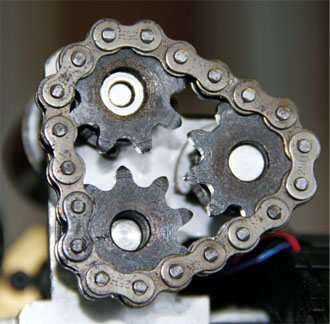 โซ่ |
|
| ข้อต่อ (Joint) ข้อต่อเป็นอุปกรณ์ที่ใช้เชื่อมต่อชิ้นส่วนที่เคลื่อนที่อย่างสัมพันธ์กันของหุ่นยนต์ โดยทั่วไปมี ๒ ชนิด คือ ข้อต่อหมุน (rotational joint) เป็นข้อต่อที่ต่อกับชิ้นส่วนที่เคลื่อนที่ในลักษณะที่มีการหมุนรอบข้อต่อ และข้อต่อเชิงเส้น (linear joint) เป็นข้อต่อที่ต่อกับชิ้นส่วนที่เคลื่อนที่ในลักษณะเป็นเชิงเส้น เช่น เคลื่อนที่แบบไป-กลับในแนวเส้นตรงหรือโค้ง |
|
 สปริงขด |
|
| สปริง (Spring) สปริงเป็นชิ้นส่วนที่มีความยืดหยุ่น มีหน้าที่หลายอย่าง เช่น ส่งแรงจากชิ้นส่วนหนึ่งไปยังอีกชิ้นส่วนหนึ่ง รองรับแรงกระแทก เป็นแหล่งพลังงานให้แก่กลไก และยังมีหน้าที่ให้ชิ้นส่วนกลับคืนสู่ตำแหน่งเดิม สปริงที่นิยมใช้ในหุ่นยนต์ ได้แก่ สปริงขด สปริงขดแบบดึง สปริงขดแบบบิด สปริงแผ่น สปริงแหวน และสปริงลาน |
|
 ข้อต่อสวมเพลาแบบยืดหยุ่นได้ |
ข้อต่อสวมเพลา (Coupling) ข้อต่อสวมเพลาเป็นอุปกรณ์ซึ่งมีหน้าที่ส่งถ่ายแรงบิดระหว่างเพลา ๒ เพลา โดยเพลาที่ต่อกับต้นกำลังจะเป็นเพลาขับ และอีกด้านหนึ่งเป็นเพลาตาม ข้อต่อสวมเพลาที่นิยมใช้กับหุ่นยนต์สามารถแบ่งออกได้ดังนี้
|
| คลัตช์ (Clutch) คลัตช์เป็นอุปกรณ์ที่มีหน้าที่ส่งถ่ายแรงบิดระหว่างเพลา ๒ เพลา เช่นเดียวกับข้อต่อสวมเพลา แต่สามารถตัดต่อกำลังในการส่งถ่ายได้ในขณะที่เพลากำลังหมุนอยู่ คลัตช์แบ่งเป็น ๒ ประเภทใหญ่ๆ คือ คลัตช์ที่ใช้แรงเสียดทานระหว่างผิวสัมผัส (friction clutch) ได้แก่ คลัตช์แผ่น คลัตช์ลิ่ม คลัตช์ก้ามปู และคลัตช์แม่เหล็กไฟฟ้า คลัตช์ประเภทนี้จะเกิดการลื่นไถลได้ ทำให้ลดแรงกระแทกที่เกิดขึ้นที่ข้อต่อเพลา แต่มีข้อเสียคือ มักเกิดความร้อนสูง ส่วนคลัตช์อีกประเภทหนึ่งคือ คลัตช์ที่ไม่ใช้ความเสียดทานระหว่างผิวสัมผัส (positive contact clutch) ได้แก่ คลัตช์ที่ใช้วิธีการล็อกทางกลโดยตรง (direct mechanical lock-up) ข้อดีคือ ไม่มีการลื่นไถลทำให้ไม่เกิดความร้อน ส่วนข้อเสีย คือ ไม่สามารถตัดต่อเพลาที่หมุนด้วยความเร็วรอบสูงได้ และจะเกิดแรงกระแทกขึ้นทุกครั้ง |
|
 คลัตซ์แผ่น |
|
| เบรก (Break) เบรกเป็นอุปกรณ์ที่ใช้ควบคุมการเคลื่อนที่ของชิ้นส่วน ทำให้การเคลื่อนที่ช้าลง หรือหยุดการเคลื่อนที่ของชิ้นส่วนนั้นๆ ด้วยการใช้แรงเสียดทานระหว่างผิวสัมผัส เบรกแบ่งออกเป็น ๓ประเภทใหญ่ๆ คือ เบรกแผ่นคาด เบรกก้ามปู และเบรกแบบจาน |
|
 เบรก |
|
| ตลับลูกปืนและปลอกสวม (Bearing and Bush) ตลับลูกปืนและปลอกสวมต่างก็เป็นอุปกรณ์ที่ใช้รองรับจุดหมุน หรือจุดต่างๆ ที่เคลื่อนที่ของหุ่นยนต์ มีหน้าที่ลดแรงเสียดทาน ที่เกิดจากการเคลื่อนไหวของอุปกรณ์ |
|
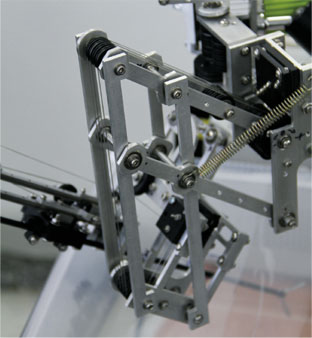 กลไกก้านต่อโยง จอเรดาร์แบบพีพีไอ |
ก้านต่อโยง (Link) ก้านต่อโยงในที่นี้หมายถึง ชื่อเรียกชิ้นส่วนของวัตถุที่นำมาเชื่อมต่อ เพื่อสร้างการเคลื่อนไหวของหุ่นยนต์ ซึ่งหากนำก้านต่อโยงหลายๆ อันมาต่อรวมกันจะเรียกว่า กลไก |